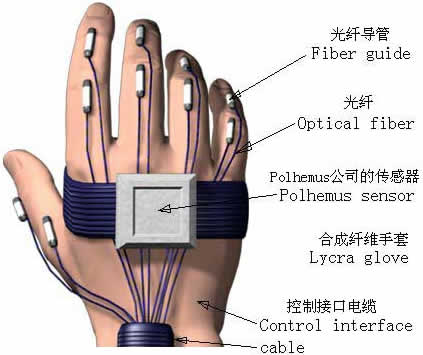
下图表示,数据手套DataGlove的结构。
图 2-1-04
|
图 2-1-05
 Joint Angle Coupling 关节角耦合 Index finger 食指 Middle finger 中指 |
图 2-1-06
点击观看放大效果 |
| 把原始的传感器读数变成手指关节角的过程称为手套校准。每当开始一次新的仿真,戴上数据手套时,都必须重新作校准。这是因为不可能知道是否用户把手套松紧合适地戴在手指上。 下图表示,数据手套DataGlove的结构。 图 2-1-04
图 2-1-05
图 2-1-06
|