|
|
|
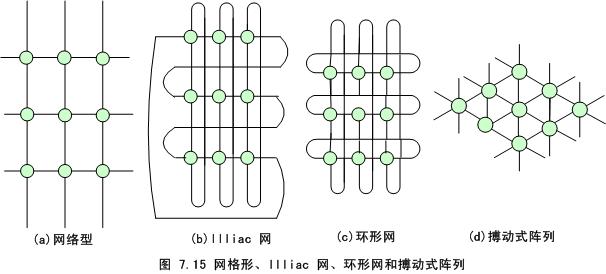
(6)网格形和环网形 图7.15a所示为一个3×3网格形网络。这是一种比较流行的结构,它已以各种变体形式在Illiac
IV、MPP、DAP、CM-2和Inetl Paragon中得到了实现。
(7)搏动式阵列 这是一类为实现确定算法而设计的多维流水线阵列结构。图7.15d所示就是为完成矩阵-矩阵相乘而专门设计的搏动式阵列。此例的内部结点度为6。 |
|
|
|
(6)网格形和环网形 图7.15a所示为一个3×3网格形网络。这是一种比较流行的结构,它已以各种变体形式在Illiac
IV、MPP、DAP、CM-2和Inetl Paragon中得到了实现。
(7)搏动式阵列 这是一类为实现确定算法而设计的多维流水线阵列结构。图7.15d所示就是为完成矩阵-矩阵相乘而专门设计的搏动式阵列。此例的内部结点度为6。 |